Computer Vision System
Road Sign Detection
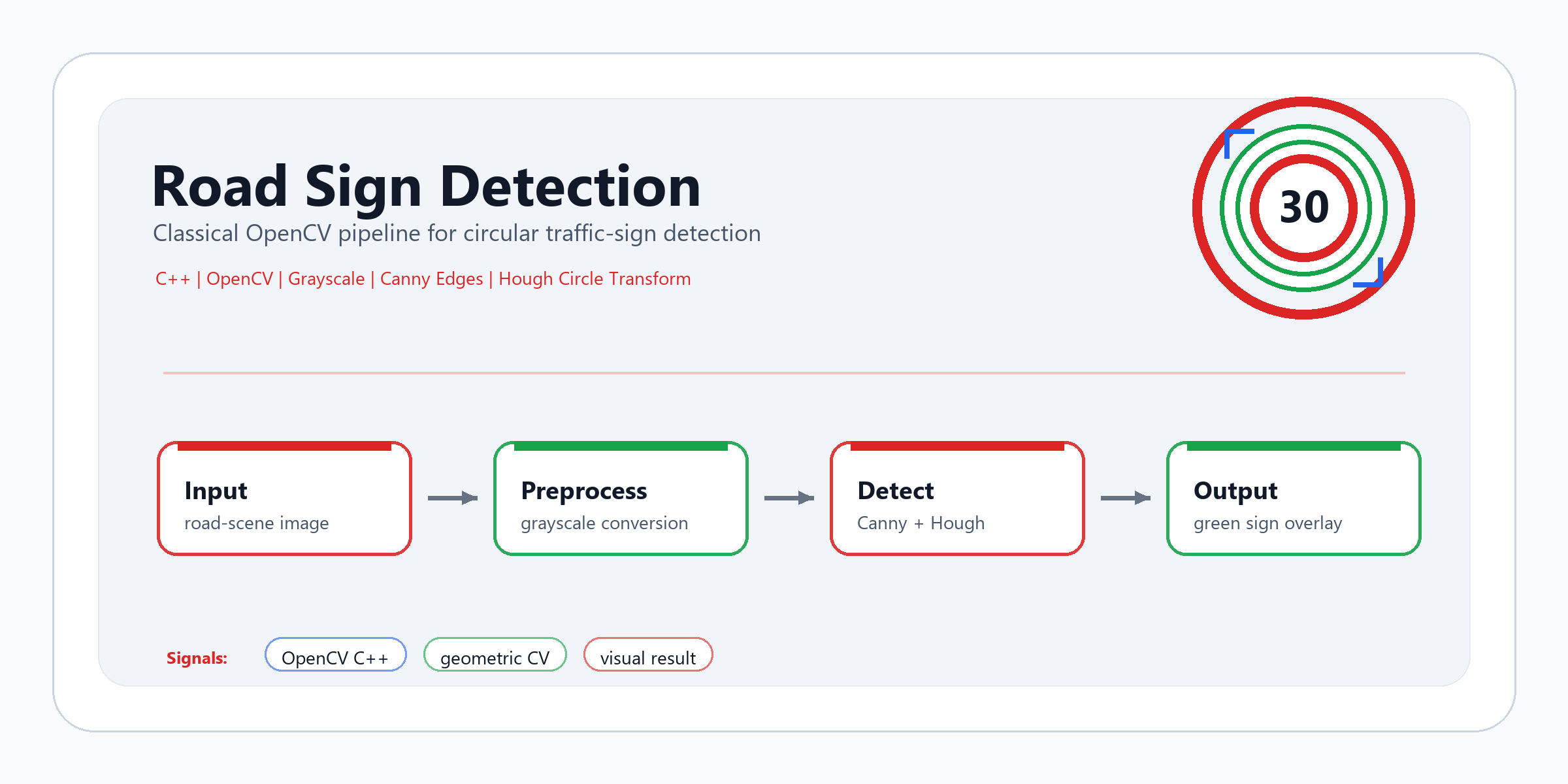
Classical computer-vision workflow that detects circular traffic signs using C++, OpenCV, grayscale preprocessing, Canny edge detection, and Hough Circle Transform.
Overview
Road Sign Detection is a focused computer-vision project that identifies circular traffic signs in road-scene images. The implementation uses a deterministic OpenCV pipeline rather than a deep-learning model, making the detection process transparent, lightweight, and easy to inspect.
Problem
Traffic-sign detection is a foundational problem in road-scene understanding, autonomous driving, driver-assistance systems, and intelligent transportation. Circular road signs are a useful constrained target for classical geometric detection.
Solution
The C++ program loads a road image, converts it to grayscale, extracts edges with Canny, detects circular candidates with Hough Circle Transform, and draws detected signs back onto the original image for visual validation.
Technical Highlights
- Image loading with OpenCV
imread. - BGR-to-grayscale preprocessing with
cvtColor. - Canny edge detection for strong boundary extraction.
- Hough Circle Transform for circular sign candidates.
- Result overlay using OpenCV drawing utilities.
- Before/after visual outputs for inspection.
Future Improvements
- Replace hardcoded image paths with command-line arguments.
- Save output images automatically.
- Add color segmentation for red-bordered triangular signs.
- Package the build with CMake.
- Compare the classical detector against a YOLO or TensorFlow object-detection baseline.